AULA 6 - Microcontroladores - Técnico: mudanças entre as edições
imported>Fargoud |
imported>Fargoud |
||
| Linha 51: | Linha 51: | ||
[[imagem: dutycicle4.png]] | [[imagem: dutycicle4.png]] | ||
--------------- | |||
===Exemplo 3:=== | ===Exemplo 3:=== | ||
Regulador de velocidade simples para motores CC de 5V: | Regulador de velocidade simples para motores CC de 5V: | ||
| Linha 66: | Linha 67: | ||
[[imagem: montagemmotor2.png|center]] | [[imagem: montagemmotor2.png|center]] | ||
[[imagem: montagemmotor3.png|center]] | |||
link para o vídeo: [https://www.youtube.com/watch?v=m1V5eU_oNE4 Acionando motor 5V com Arduino] | link para o vídeo: [https://www.youtube.com/watch?v=m1V5eU_oNE4 Acionando motor 5V com Arduino] | ||
| Linha 83: | Linha 86: | ||
analogWrite(9, potValue); | analogWrite(9, potValue); | ||
} | } | ||
===Exemplo 4:=== | ===Exemplo 4:=== | ||
Edição das 11h11min de 5 de outubro de 2016
Sinal PWM – Pulse Width Modulation
(Modulação por Largura de Pulso)
PWM (Pulse Width Modulation – Modulação por Largura de Pulso) é uma técnica para obter resultados analógicos por meios digitais.
Essa técnica consiste na geração de uma onda quadrada em uma frequência muito alta em que pode ser controlada a porcentagem do tempo em que a onda permanece em nível lógico alto.
Esse tempo é chamado de Duty Cycle (Ciclo de trabalho) e sua alteração provoca mudança no valor médio da onda, indo desde 0V (0% de Duty Cycle) a 5V (100% de Duty Cycle) no caso do Arduino.
O Arduino UNO possui 6 (seis) portas PWM, 3, 5, 6, 9, 10 e 11.
O sinal PWM pode variar de 0 a 255 e para ativá-lo basta usar a seguinte instrução em uma das portas PWM:
analogWrite(pin, sinal_pwm);
Note que as portas PWM são todas digitais, porém o sinal é modulado “como se fosse” um sinal analógico.
Ciclo de Trabalho – Duty-Cicle
O sinal PWM possui um ciclo de trabalho que determina com que frequência o sinal muda do nível lógico HIGH para o nível lógico LOW e vice versa.
No Arduino a frequência do PWM pode ser definida entre 32Hz até 62kHz.
Duty cicle = (100% * largura do pulso) / período




O valor do Duty Cycle usado pelo Arduino é um inteiro armazenado em 8 bits, de forma que seu valor vai de 0 (0%) a 255 (100%).
Exemplo:
Para um sinal PWM de valor 200 temos:
Se 255 é 100%, 200 é aproximadamente 78,4%. Como a tensão máx de saída do Arduino é 5V a tensão média do sinal PWM será:
Vmédio = Vmax*Duty Cycle(%) Vmédio=5*78,4% Vmédio=3,92V
Exemplo 2:
mudando a intensidade de um led de alto brilho com sinal PWM

Exemplo 3:
Regulador de velocidade simples para motores CC de 5V:
Componentes:
- Arduino
- protoboard e fios
- 1 resistência de 2,2 K
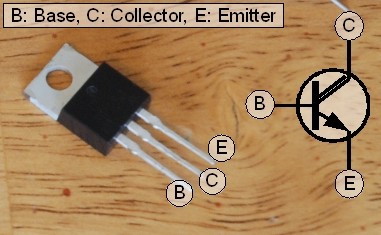
- 1 transistor TIP120
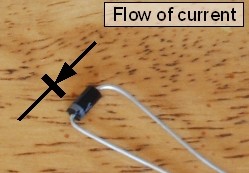
- 1 diodo 1N4148
- 1 potenciômetro de 10 K
- 1 motor de 5V




link para o vídeo: Acionando motor 5V com Arduino
Código:
int potPin = 0; // Analog pin 0 connected to the potentiometer
int transistorPin = 9; // connected from digital pin 9 to the base of the transistor
int potValue = 0; // value returned from the potentiometer
/*** FUNÇÃO setup() ***/
void setup() { // set the transistor pin as an output
pinMode(transistorPin, OUTPUT);
}
/*** FUNÇÃO loop() ***/
void loop() { // read the potentiometer, convert it to between 0 - 255 for the value accepted by the digital pin.
potValue = analogRead(potPin) / 4; // potValue alters the supply from pin 9 which in turn controls the power running through the transistor
analogWrite(9, potValue);
}
Exemplo 4:
Regulador de velocidade simples para motores CC de 12V:
Componentes:
- Arduino
- protoboard e fios
- 4 leds
- 4 resistências de 220ohm
- 1 resistência de 1 K
- 1 transistor TIP122
- 1 diodo 1N4001
- 1 capacitor de 1 microF
- 1 potenciômetro de 10 K
- 1 motor de 12v
- 1 fonte de 12v

link para o vídeo: Acionando motores de 12V com arduino
Código:
/*variáveis globais */
int led1=6;
int led2=9;
int led3=10;
int led4=11;
int trimpot=5;
int motor=3;
/* Função setup() de inicialização */
void setup(){
pinMode(led1,OUTPUT);
pinMode(led2,OUTPUT);
pinMode(led3,OUTPUT);
pinMode(led4,OUTPUT);
pinMode(trimpot,INPUT);
}
/* Função loop() */
void loop(){
int value = analogRead(trimpot); //lê valor de velocidade no potenciômetro
analogWrite(motor,value/4); //envia sinal PWM para motor pelo pino 3
if(value<254){ //acende só o primeiro led do bargraph
analogWrite(led1,value);
analogWrite(led2,0);
analogWrite(led3,0);
analogWrite(led4,0);
}
if(value>254 and value<511){ //acende dois leds do bargraph
analogWrite(led2,254);
analogWrite(led3,0);
analogWrite(led4,0);
}
if(value>511 and value<765){ //acende três leds do bargraph
analogWrite(led3,254);
analogWrite(led4,0);
}
if(value>765){ //acende todos os leds do bargraph
analogWrite(led4,254);
}
}